Klipper: ファームウェアのインストール¶
このページでは、Klipper ファームウェアを iDryer Unit コントローラー (RP2040 上の MCU) にインストールする方法について説明しています。
ファームウェアのインストールは 2 つのステップで行われます:
- ブートローダー Katapult のインストール — USB を介して BOOT モードに入らずに Klipper を再プログラムできます。
- Katapult 経由で Klipper をインストールします。
要件¶
- Klipper がインストールされたホスト (Raspberry Pi または同等)。
- データ転送用 USB ケーブル。
- ホストのターミナルへの SSH アクセス。
パート 1: Katapult のインストール¶
1. 環境の準備¶
システムが最新であることを確認し、依存関係をインストールしてください:
sudo apt update
sudo apt install git build-essential gcc-arm-none-eabi libnewlib-arm-none-eabi \
libstdc++-arm-none-eabi-newlib cmake python3 python3-pip python3-serial \
usbutils dfu-util
2. Katapult をダウンロード¶
3. ビルド構成¶
スクリーンショットに従ってパラメーターを選択してください:
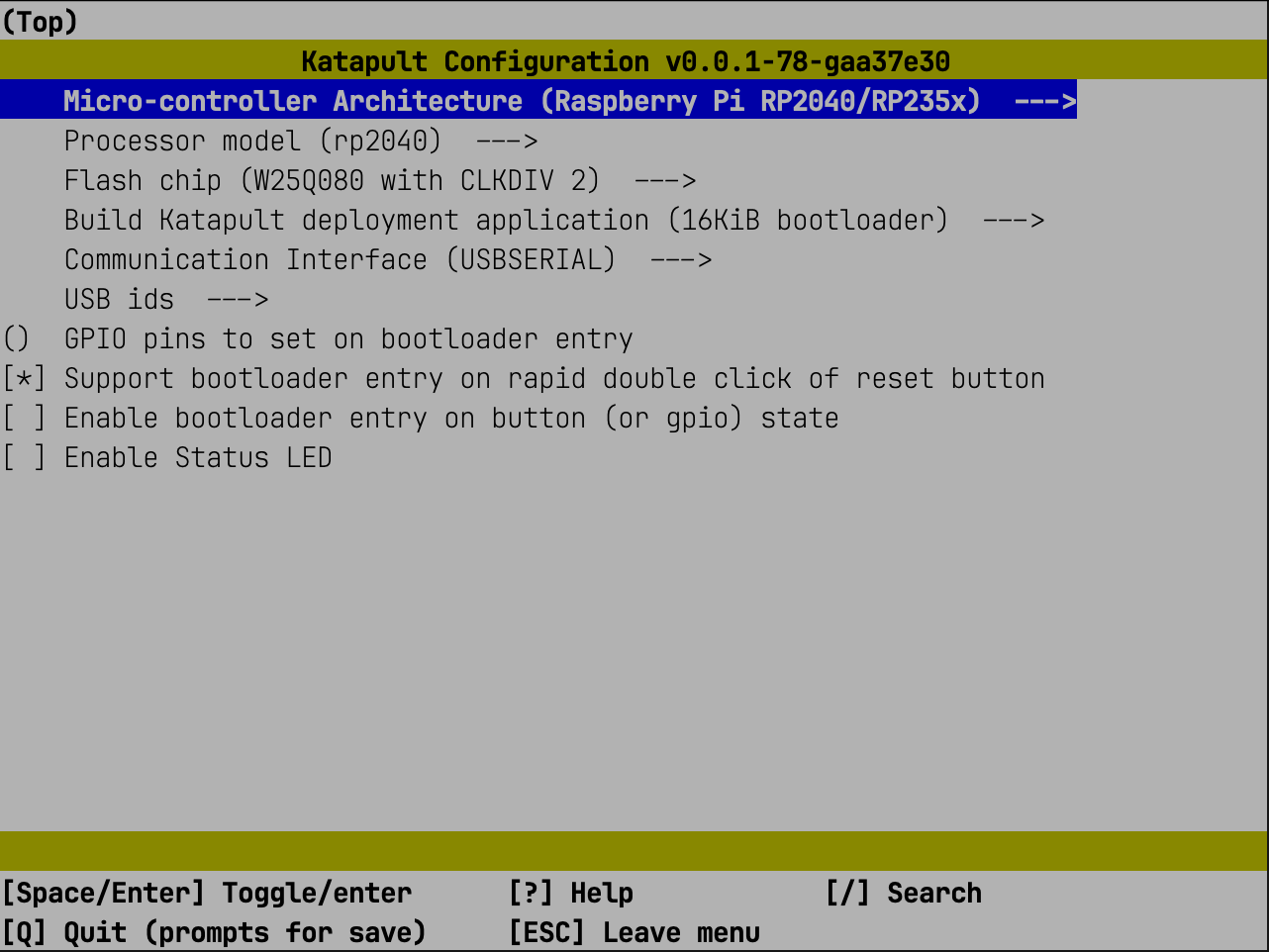
重要
構成が正しく選択されていることを確認してください。不正なビルドでブートローダーを上書きするとデバイスが機能しなくなります – 復旧にはプログラマーが必要です。
4. コンパイル¶
5. コントローラーを BOOT モードに移行¶
以下のいずれかの手順を実行してください:
BOOTを押し続け、USB を接続し、BOOTを離してください (USB が切断されている状態)。BOOTを押し続け、RESETを短く押し、BOOTを離してください。
6. コントローラーの USB ID を決定¶
出力には以下のような行が表示されます:
7. Katapult をプログラム¶
パート 2: Klipper のインストール¶
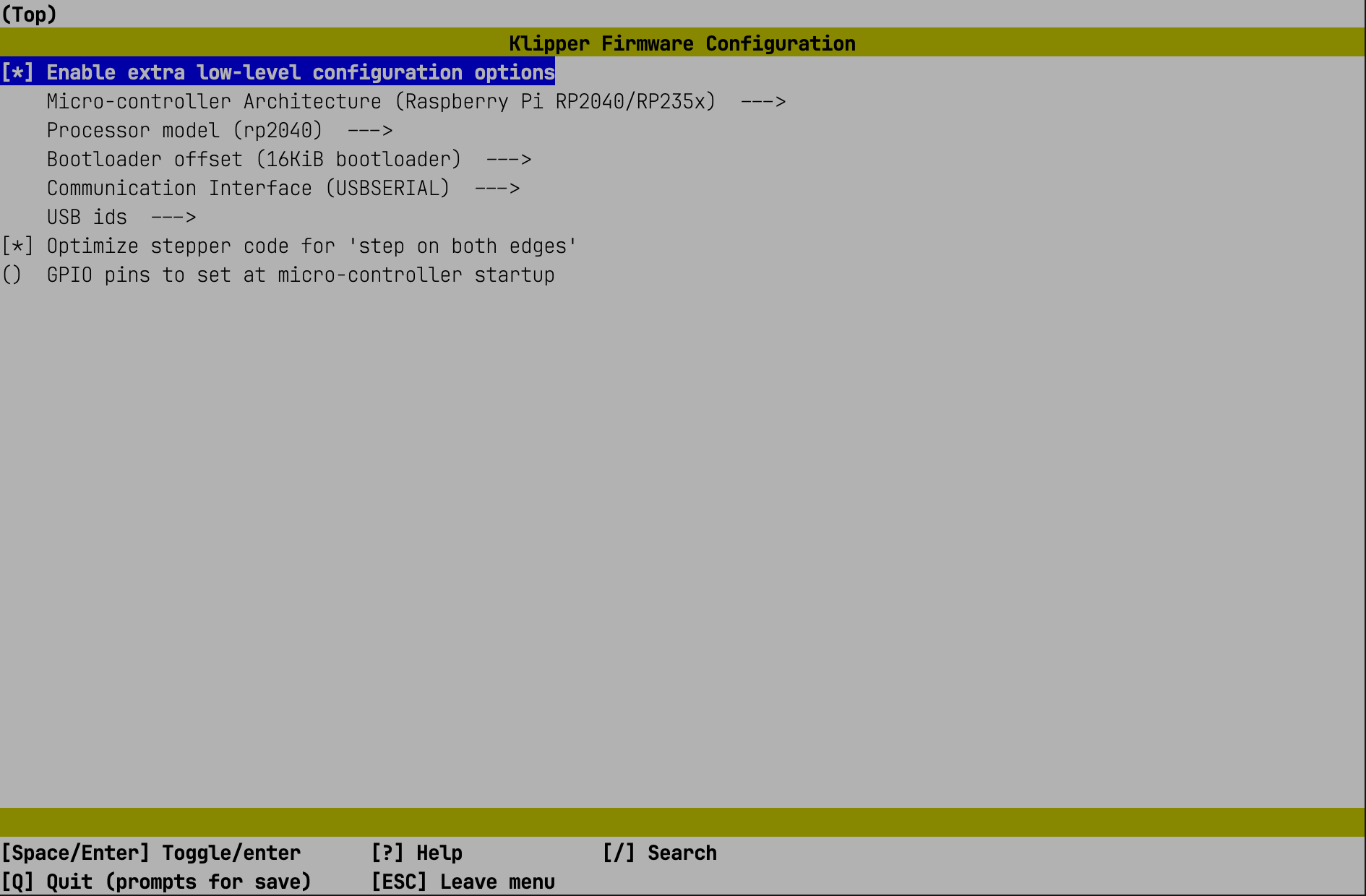
8. Klipper ビルド構成¶
スクリーンショットに従ってパラメーターを選択してください:
9. Klipper をコンパイル¶
10. Python ライブラリをインストール¶
11. シリアル ID を決定¶
USB を再度接続するか、RESET を押し、デバイスが表示されるのを待ってください:
予想される結果:
12. Katapult 経由で Klipper をプログラム¶
cd ~/katapult/scripts
python3 flashtool.py -d /dev/serial/by-id/usb-katapult_rp2040_XXXXXXXXXXXXXXXX-XXXX
13. 結果を確認¶
プログラミングが成功すると、デバイス ID に Klipper が含まれます:
次のステップ¶
iDryer 設定ファイルのインストール – 「構成」セクション。