连接舵机¶
舵机是带齿轮箱和控制电子元件的小电机。你可以告诉它把轴转到哪个位置。
在类似 iDryer 的设备中,舵机可以打开风门、移动小锁扣、按下机械开关,或改变气流方向。
舵机的主要错误是:把它当成“小东西”,以为可以从控制器任意 5V 引脚供电。舵机可能消耗很大电流,尤其是在启动、突然动作或机构卡住时。
三根线¶
典型 hobby servo 有三根线:
- 电源:通常是
5V或6V; - 地:
GND; - 信号:来自控制器的控制脉冲。
常见颜色:
- 红色 - 电源;
- 黑色或棕色 - 地;
- 黄色、橙色或白色 - 信号。
但不能盲目信任颜色。不同厂商可能使用不同配色。连接前,请检查标识、产品页面或 datasheet。
电源分开,信号分开¶
信号线不给舵机供电。它只告诉舵机转到哪里。
舵机从电源线获取能量。
正确逻辑是:
- 控制器只提供控制信号;
- 舵机由能承受其电流的 5V/6V 电源供电;
- 控制器地和舵机电源地连接在一起。
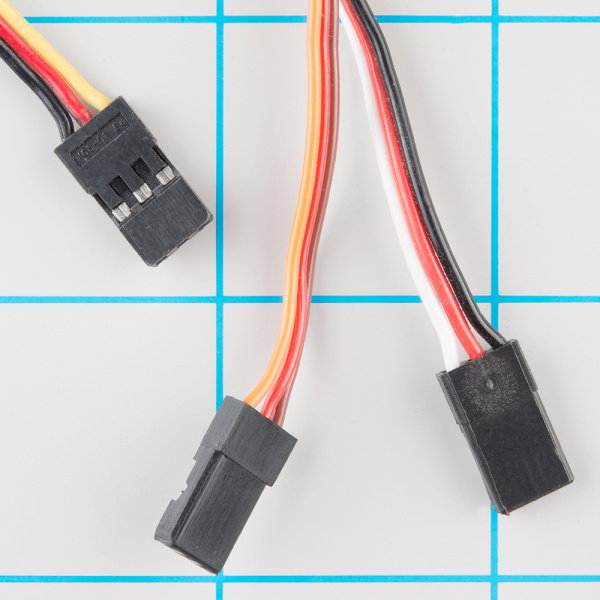
来源:SparkFun Electronics, CC BY-SA 4.0
为什么不能从弱 5V 供电¶
许多板子都有 5V 引脚。这不表示可以安全地从它给舵机供电。
舵机运动时消耗的电流可能远大于它的尺寸暗示。如果电源不足,常见症状包括:
- 控制器重启;
- 屏幕闪烁;
- USB 连接断开;
- 舵机抽动;
- ESP32 的 Wi-Fi 掉线;
- 舵机嗡嗡响但不移动;
- 动作开始时电源下陷。
一个小舵机有时可以由板载电源供电,前提是板子和电源明确支持该电流。但在带风门、锁扣或机构的真实设备中,最好使用带余量的独立 5V/6V DC-DC 或电源。
公共地¶
如果舵机由独立电源供电,就需要公共地。
没有公共地时,控制器和舵机没有共同信号参考电平。舵机可能不响应、抽动或随机动作。
简单连接:
- 电源的
+5V或+6V接舵机电源。 - 电源的
GND接舵机地。 - 控制器
GND接到同一个地。 - 控制器 PWM/GPIO 引脚接舵机信号线。
舵机电源和控制器电源可以不同,但地必须共用。
需要什么信号¶
典型位置舵机由脉冲控制。
典型信号:
- 大约每
20 ms一个脉冲; - 约
1 ms- 行程一端; - 约
1.5 ms- 中间; - 约
2 ms- 行程另一端。
这不是用于 LED 亮度或风扇速度的普通 PWM。这里重要的是微秒级脉冲宽度。
具体舵机的实际极限可能不同。有些舵机安全范围不是 0 到 180 度,而更小。因此极限位置需要谨慎测试。
不要让舵机顶住机构¶
舵机会尝试保持命令位置。
如果风门碰到外壳、连杆卡住,或机构在命令结束前到达物理限位,舵机会继续推。此时电流升高,电机发热,齿轮箱磨损。
这对风门和锁扣尤其重要。
长期运行前确认:
- 机构在整个范围内能自由移动;
- 没有错位;
- 连杆不卡住;
- 舵机在终点位置不嗡嗡响;
- 固件中的极限角度不会把机构顶到限位;
- 断电时设备仍安全,或按设计由弹簧复位。
如果舵机静止时嗡嗡响,通常表示有负载、顶到限位或杠杆几何错误。
启动电流和堵转电流¶
舵机有正常运行电流,也有轴被卡住时的电流。后者通常叫 stall current。
当舵机尝试运动但轴被卡住,或机构太重时,会出现堵转电流。
这种模式常导致:
- 电源下陷;
- 控制器重启;
- 导线发热;
- DC-DC 过热;
- 齿轮箱损坏。
如果 datasheet 列出 stall current,选择电源时要按该值和安全余量计算。如果没有 datasheet,就不能凭感觉认为舵机安全。
舵机旁的电容¶
有时在舵机旁边的 +5V 和 GND 之间加一个电解电容会有帮助。
它不能替代合适电源,但可以缓和动作开始时的短暂下陷。
对于小舵机:几百微法,例如 470 uF 或更大,耐压高于供电电压。
电解电容有极性:
- 电容正极接
+5V; - 电容负极接
GND。
如果设备需要可靠,先选择正确电源和接线,再把电容作为额外措施。
Klipper 配置示例¶
在 Klipper 中,舵机用 [servo] 段描述。
示例:
[servo chamber_damper]
pin: PA8
maximum_servo_angle: 180
minimum_pulse_width: 0.001
maximum_pulse_width: 0.002
initial_angle: 90
命令:
SET_SERVO SERVO=chamber_damper ANGLE=0
SET_SERVO SERVO=chamber_damper ANGLE=90
SET_SERVO SERVO=chamber_damper ANGLE=180
这里的引脚名只是典型示例。真实设备中,请检查板卡 pinout。
对于机械部分,不要一开始就用 0 和 180。先测试安全范围,例如 60、90、120,然后再扩大角度。
Arduino/ESP32 逻辑示例¶
Arduino 方式通常使用 Servo 库:
#include <Servo.h>
Servo damper;
void setup() {
damper.attach(9);
damper.write(90);
}
void loop() {
}
这只是信号逻辑示例。舵机电源仍需要单独设计。即使信号线连接到 Arduino 或 ESP32,舵机电机也不能让控制器电源过载。
连接后要检查什么¶
安装到外壳前:
- 舵机获得正确电压;
- 电源能承受舵机电流;
- 控制器地和舵机地共用;
- 信号线接到正确引脚;
- 舵机运动方向正确;
- 极限角度不会损坏机构;
- 机构不卡住;
- 舵机不持续嗡嗡响;
- 导线不会被摇臂或齿轮挂住;
- 动作后电源不下陷;
- 控制器不重启。
在无负载和真实负载下测试机械结构。手动移动很轻松的风门,装进外壳后可能会卡住。
常见错误¶
- 从 GPIO 给舵机供电;
- 从板子弱 5V 引脚给舵机供电;
- 忘记公共地;
- 不检查就相信线色;
- 电源接反;
- 使用过细导线;
- 没有计算启动和堵转电流;
- 强迫舵机推机械限位;
- 真实机构只在较小范围安全,却使用角度
0或180; - 把舵机装在热源附近却不检查工作温度;
- 把连续旋转舵机当普通位置舵机使用。
要点¶
- 舵机有三根线:电源、地、信号。
- 信号不给舵机供电。
- 真实设备通常需要独立 5V/6V 电源。
- 舵机地和控制器地必须共用。
- 最危险的负载是卡死或机械卡住。
- 极限角度需要谨慎选择,不能直接用
0和180。 - 如果舵机动作时控制器重启,先检查电源和公共地。
相关阅读¶
- Klipper Configuration Reference: Servo - 官方
[servo]段、SET_SERVO、角度和脉冲宽度。 - SparkFun: Hobby Servo Tutorial - hobby servo、三根线和脉冲控制的基本说明。
- SparkFun: Servo Trigger Hookup Guide - 电气连接、常见线色和 hobby servo 机械结构说明。
- Adafruit: Arduino Lesson 14. Servo Motors - 连接、电源下陷行为和舵机旁电容的实用示例。
- Arduino Servo Library Reference - Arduino 方式的官方 Servo 库。