韌體
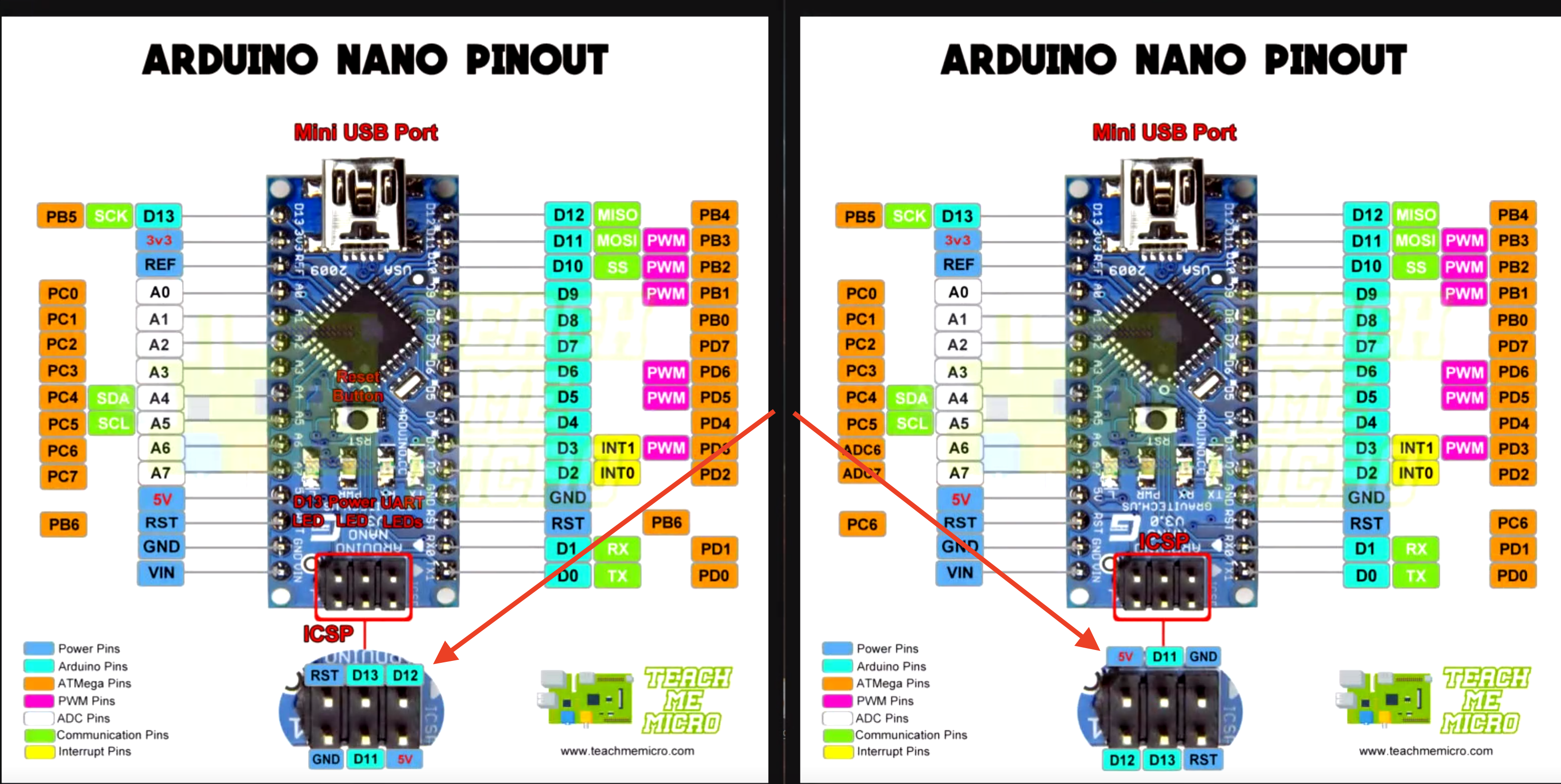
接線:
將Arduino Nano連接到USBASP編程器 (ArduinoISP未經過測試,無法使用現有的platformio.ini部分,需要自行編寫)
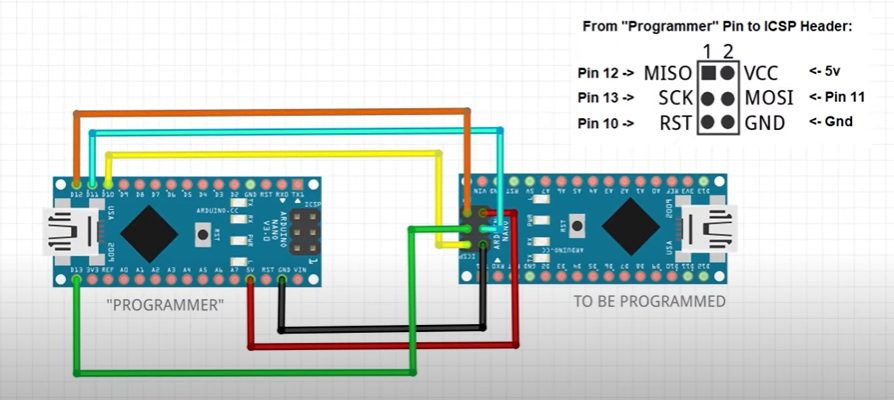
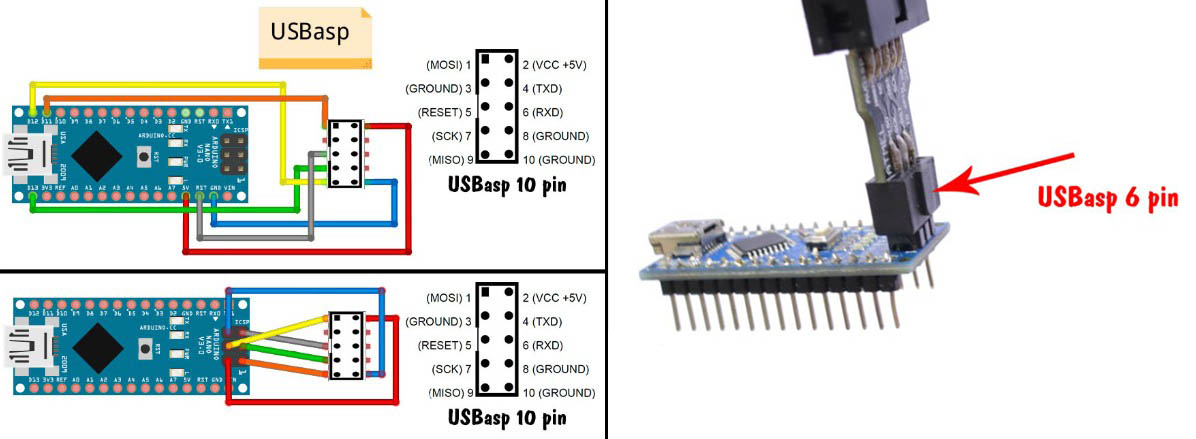
請注意,連接器引腳可能不同
編譯和刷寫固件:
configuration.h
 在configuration.h文件中配置固件。
在configuration.h文件中配置固件。
選擇秤模塊數量¶
1. 刷寫MiniCore內核¶
需要USBASP編程器
2.1 更改熔斷器設置
2.2 刷寫EEPROM¶
刷寫微控制器¶
自動PID校準 (PID calibrate)¶
按需執行
分兩個階段進行: 在configuration.h中設置
執行第2.3步驟進行刷寫 刷寫後,自動PID調整將開始,完成後屏幕上將顯示"Прошей часть 2"消息 改為 #define AUTOPID_RUN 0 並執行第2.3步驟冷卻風扇測試刷寫¶
按需執行
在configuration.h中取消註釋
執行第2.3步驟 冷卻風扇將以所有可用頻率進行測試,PWM填充比從100-10%,並將工作模式顯示在屏幕上。測試完成後,根據您對噪音級別和風扇工作質量的偏好,在configuration.h中設置 所需的頻率,註釋掉進行第2.3步驟刷寫微控制器
啟動錯誤
如果在刷寫後或使用過程中屏幕上出現錯誤,請參考configuration.h文件
教學視頻¶
視頻相關鏈接: