連接負載傳感器¶
負載傳感器通過金屬梁、按鈕或平台的微小變形來測量力或重量。
在類似iDryer的設備中,負載傳感器可以估計線軸重量、剩餘細絲或機制負載。
重點:稱重感測器幾乎從不直接連接到控制器。它的信號太小。通常,HX711 模組或類似的放大器/ADC 放置在感測器和控制器之間。
你需要什麼¶
Minimum set:
- 所需重量範圍的稱重感測器;
- HX711 module;
- controller: Arduino, ESP32, RP2040, STM32, or other board;
- rigid mechanical mounting;
- 用於校準的已知質量;
- short, neat wires.
如果機械性能較差,電路將無濟於事。稱重感測器可以完美接線,但由於未對準、遊隙或在錯誤點施加負載而給出毫無意義的讀數。
連接是如何安排的¶
稱重感測器透過類比線連接到 HX711。
HX711透過數位線連接到控制器。
典型鏈條:
HX711通常有兩個側面:
- 來自稱重感測器的輸入:
E-、A+、A-、A-或類似的; - 連接到控制器:
GND、DT、DOUT/SCK、CLK/CLK。
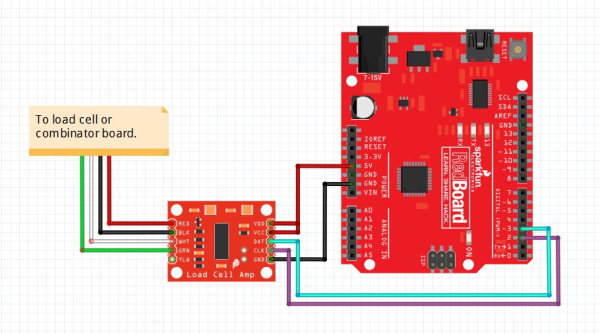
Source: SparkFun Electronics, CC BY-SA 4.0
Load cell wires¶
常見的四線稱重感測器通常具有:
E+- bridge supply plus;E-- bridge supply minus;S+,A+, orO+- positive measurement signal;S-,A-, orO-- negative measurement signal.
常見配色:
- red -
E+; - black -
E-; - green or blue -
A+; - white -
A-.
但顏色不是法律。不同的感測器可能會有所不同。如果有特定稱重感測器的數據表,請遵循該數據表。
如果感測器有第五根電線、箔片或屏蔽,則通常是電磁屏蔽。不要將其與電橋測量線混淆。通常,屏蔽連接到 A+ 或一側的外殼(如果文件有說明),但不連接到測量 A-/A-。
如果沒有接線圖,請勿「隨意」連接稱重感測器。首先找到感測器資料表或按照製造商指南圈出電橋:不正確的電線很容易導致讀數不穩定或 HX711 輸入過載。
將 HX711 連接到控制器¶
在控制器端,通常需要四行:
VCC- module power;GND- common negative;DT,DOUT, orDATA- data;SCK,CLK, orPD_SCK- clock.
對於許多 HX711 模組,電源可以是 5V 或 5V,但請檢查特定模組。如果控制器運作在3.3V,則使用與3.3V邏輯相容的模組和電源會很方便。
引腳 SCK 和 SCK 通常可以連接到常規 GPIO。這不是通常意義上的I2C或SPI,而是簡單的兩線HX711介面。
機械原理比電路更重要¶
稱重感測器必須按照製造商的預期變形。
對於光束感測器,一側通常安裝在固定底座上,另一側承受負載。如果兩側都剛性地安裝到一個零件上,感測器將不會正常彎曲。
檢查:
- 感測器的安裝面在哪裡;
- 應在何處施加負載;
- 力應該朝哪個方向移動;
- 是否需要墊片;
- 運動部件是否離開外殼;
- no misalignment;
- no side loading;
- 螺絲沒有擰得太緊;
- 線軸或平台不會落在感測器的工作區域之外。
對於線軸重量,尤其重要的是所有負載都必須通過感測器,而不是部分通過外殼壁、軸、電纜或裝飾蓋。
不要使感測器過載¶
稱重感測器的範圍不是建議,而是測量限制。
如果將 1 kg 感測器放置在線軸和支架可能超過此重量的位置,則感測器將工作不良或永久變形。
選擇帶邊距的範圍:
- maximum spool weight;
- holder weight;
- possible jerks;
- misalignment;
- 使用者錯誤的安全裕度。
但太大的範圍也不總是好的。 100 公斤感測器對小線軸的感應效果比具有相同機械和電子設備的 5 公斤或 10 公斤感測器差。
首次啟動¶
在安裝到設備之前,請在工作台上測試系統:
- 將稱重感測器連接至 HX711。
- 將 HX711 連接到控制器。
- Run test code or a library.
- 確保按下感應器時原始值會改變。
- 卸下負載並檢查該值是否相當穩定。
- 放置一個已知質量並檢查是否有變化。
在此階段,不要求克精度。首先,您需要查看感測器是否處於活動狀態、負載方向正確且讀數變化可預測。
如果該值隨著權重的增加而減少,通常只需交換 A- 和 A- 或考慮登入代碼即可。
皮重和校準¶
未經校準的稱重感測器不知道克是什麼。
典型流程:
- Place empty platform.
- 皮重:平台重量為零。
- Place a known mass.
- Select calibration factor.
- 檢查幾個不同的重量。
對於細絲線軸,確定什麼算是重量:
- 整個線軸採用塑膠;
- 僅剩餘塑料,無空線軸重量;
- 重量相對於初始值的變化。
如果不同製造商的空線軸重量不同,則準確的剩餘計算需要了解具體的空線軸重量或進行粗略估計。
噪音和讀數不穩定¶
HX711 測量非常小的訊號,因此系統對雜訊和機械問題很敏感。
讀數不穩定的原因:
- 從感測器到 HX711 的電線很長;
- poor contacts;
- 訊號線旁的加熱器電源線;
- fan or printer vibration;
- soft base;
- play in mounting;
- temperature drift;
- 負載繞過感測器接觸外殼。
Practical measures:
- 使 HX711 靠近稱重感測器;
- 請勿將訊號線與加熱器電源線並排走線;
- 固定電線,使其不會拉動感應器;
- 使用測量平均值;
- 安裝到外殼後進行校準;
- 如果溫度顯著影響讀數,請在設備預熱後去皮。
組裝後要檢查什麼¶
使用前:
- 感測器額定重量為所需重量;
- 負載通過感測器的工作部分;
- 緊固件不阻擋變形;
- HX711 receives correct power;
SCK和SCK連接到右側GPIO;- common ground exists;
- 原始值在負載下會改變;
- 無負載時,讀數不會漂移太快;
- 已知質量顯示校準後的預期重量;
- 電線不會拉動平台;
- 線軸或支架不會越過感知器接觸外殼。
常見錯誤¶
- 將稱重感測器直接連接到控制器類比輸入;
- 混淆
E-/A+和A-/A-; - 無需數據表即可信任電線顏色;
- forgetting calibration;
- 最終機械安裝前去皮重;
- 安裝感應器,使其不能彎曲;
- 感測器過載;
- 選擇太大的範圍而失去靈敏度;
- 由於長電線和乾擾而導致不穩定;
- 期望從沒有剛性機械結構的柔性塑膠體獲得克數精度。
要點¶
- 稱重感測器通常透過HX711連接,而不是直接連接到控制器。
- 感測器線連接至
E-、A+、A-、A-。 - HX711 透過電源、接地、
SCK和SCK連接到控制器。 - 機械裝置比電路更重要:負載必須正確通過感測器。
- 需要使用已知質量進行皮重和校準。
- 如果沒有牢固的安裝和適當的機械結構,就不可能獲得準確的讀數。
相關閱讀¶
- SparkFun: Load Cell Amplifier HX711 Breakout Hookup Guide - practical HX711 and load cell connection, wire colors,
DT/SCK, and calibration example. - SparkFun: Load Cell Amplifier HX711 product page - HX711 module description, purpose, and microcontroller interface.
- DigiKey: HX711 Datasheet by Avia Semiconductor - HX711 technical datasheet: 24-bit ADC, differential bridge input, gain, and digital interface.
- Phidgets: Load Cell Guide - practical examples of load cell mechanical installation and load application direction.
- SparkFun retired HX711 guide: load cell mechanical setup - useful illustrations of beam, button, and platform sensor mounting options.