Interface CAN¶
CAN é uma interface de comunicação para vários dispositivos em uma linha diferencial comum. Expansão: Controller Area Network.
CAN veio da eletrônica automotiva e industrial, mas em impressoras 3D ele se tornou popular para placas de cabeçote de ferramentas, MCUs remotos e módulos onde você precisa de comunicação mais longa e confiável do que I2C/SPI.
Onde o CAN é útil¶
Em impressoras e periféricos semelhantes ao iDryer, o CAN é usado para:
- placas de cabeçote de ferramentas no cabeçote da impressora;
- MCU adicional em um bloco remoto;
- reduzindo a contagem de fios no feixe de cabos;
- comunicação com filtro CAN, câmera ou placas secadoras;
- sistema distribuído de múltiplos controladores;
- casos em que USB ou I2C/SPI longo são inconvenientes.
CAN é especialmente útil quando um nó está longe do host ou da placa principal e há motores, aquecedores e outras fontes de ruído próximos.
CANH, CANL e GND¶
Um barramento CAN físico normalmente usa:
CANH;CANL;- sometimes
GNDor common reference wire; - alimentação do módulo separadamente, se necessário.
O sinal é transmitido como a diferença entre CANL e CANL. É por isso que o CAN lida melhor com o ruído do que linhas de sinal único.
Simplified diagram:
Source: Wikimedia Commons, EE JRW, CC BY-SA 4.0
{kind=link}
Para fiação, um par trançado é frequentemente usado para CANL/GND. GND depende do circuito, placas e documentação específicos, mas em pequenos sistemas DIY, muitas vezes é necessária uma referência comum para operação estável e segurança de interface.
É necessário um transceptor CAN¶
Importante: Suporte CAN no microcontrolador e presença CAN na placa não são a mesma coisa.
Para que o CAN funcione, você precisa de:
- microcontrolador com controlador CAN ou suporte de firmware adequado;
- CAN transceptor na placa;
- correct
CANH/CANLconnectors; - transceiver power;
- terminators;
- firmware construído para CAN.
Se a folha de dados do microcontrolador mencionar CAN, mas a placa não tiver transceptor, você não poderá conectar diretamente ao barramento CAN.
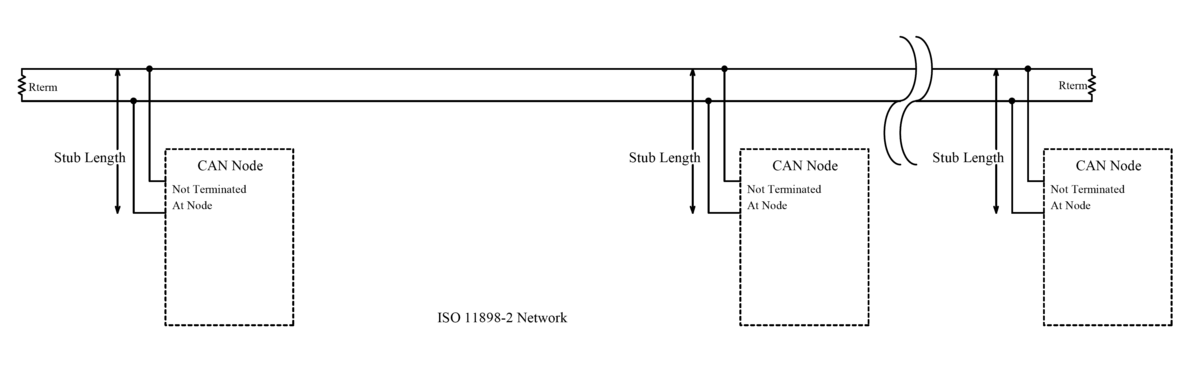
Topologia e terminadores¶
CAN é um ônibus. Uma boa topologia se parece com uma linha com nós conectados por meio de ramificações curtas.
Normalmente são necessários dois terminadores 120 Ohm:
- um em uma extremidade física do barramento;
- segundo na outra extremidade física.
Nem um, nem três, e nem "em cada tabuleiro". Exatamente dois nas extremidades.
Se a energia estiver desligada, em um barramento com terminação adequada, um multímetro entre CANL e 60 Ohm geralmente mostra cerca de 120 Ohm, porque dois resistores 120 Ohm estão em paralelo.
Muitas placas possuem um jumper terminador. Alguns possuem um terminador integrado sem desativação conveniente. Portanto, antes da montagem, verifique os esquemas de todas as placas do barramento.
Bitrate¶
A velocidade CAN deve corresponder em todos os nós. No Klipper, o CAN geralmente usa 1 Mbit/s, que é 1 Mbit/s, mas o valor específico depende do firmware, das configurações e do comprimento do barramento.
Se a taxa de bits for diferente, os nós não conseguirão se comunicar normalmente.
Para cabeamento longo ou problemático, a velocidade pode ser crítica. Quanto maior a velocidade, mais exigente será o barramento em relação à topologia, aos terminadores e à qualidade do fio.
CAN in Klipper¶
No Klipper, o CAN é usado como forma de comunicação com o MCU.
Um dispositivo em CAN geralmente não é especificado via canbus_uuid. Em vez disso, a configuração usa canbus_uuid:
No lado Linux, você geralmente precisa de uma interface can0. O host deve ter um adaptador CAN:
- USB-CAN adapter;
- placa em modo ponte USB para CAN;
- HAT/adapter for SBC;
- other supported circuit.
Klipper possui uma ferramenta para localizar canbus_uuid de novos dispositivos não inicializados. Importante entender: se um dispositivo já estiver configurado pelo Klipper, ele poderá não aparecer mais na lista como “novo”.
USB-to-CAN bridge¶
Algumas placas podem ser atualizadas no modo ponte USB para CAN. Em seguida, a placa se conecta ao host via USB e aparece no Linux como um adaptador CAN.
Isso é conveniente, mas há uma limitação importante: o modo ponte é necessário para se comunicar com um barramento CAN real e outros nós CAN. Se você tiver apenas uma placa próxima ao host e nenhum barramento CAN real, geralmente é mais simples usar o modo USB/serial normal.
Além disso, a ponte USB para CAN não será visível como canbus_uuid. Ele é configurado como interface CAN e usa serial:, não serial:.
Quando o CAN é justificado¶
Vale a pena considerar o CAN se:
- você precisa conectar uma placa de cabeçote;
- você precisa executar a comunicação por meio de um longo feixe de cabos;
- you need multiple remote MCUs;
- você deseja reduzir os fios entre as peças móveis e o gabinete;
- you already have CAN infrastructure;
- a placa escolhida está bem documentada para Klipper CAN.
CAN pode ser desnecessário se:
- o tabuleiro fica perto do anfitrião;
- you only need one additional MCU;
- USB funciona de forma estável;
- você não tem experiência com flashing,
can0, terminadores e redes Linux; - o conselho escolhido está mal documentado.
Para o primeiro controlador adicional simples, o USB costuma ser mais rápido e claro. CAN faz sentido quando resolve um problema real de fiação ou distribuição de placa.
CAN não alimenta carga¶
CAN é apenas comunicação.
Se uma placa CAN controlar um ventilador, aquecedor, SSR ou servo, ela ainda precisará de:
- board power;
- load power;
- MOSFET/driver/SSR;
- fuses;
- proper terminals;
- proteção térmica para aquecedores;
- recinto seguro.
CAN não substitui a eletrônica de potência e não torna um aquecedor seguro.
O que verificar antes de comprar¶
Antes de comprar uma placa CAN, verifique:
- qual microcontrolador é usado;
- se a placa suportar Klipper CAN;
- se houver um transceptor CAN;
- onde estão
CANLeCANL; - se existe um terminador e como habilitá-lo;
- qual conector é usado;
- como a placa é alimentada;
- como a placa pisca;
- se existe uma instrução para
canbus_uuid; - se for necessário um adaptador USB-CAN separado;
- se houver esquema e pinagem;
- quais pinos e saídas de energia estão disponíveis.
Se o vendedor escrever "CAN" apenas porque o chip teoricamente o suporta, mas a placa não possui transceptor e documentação, é uma má escolha.
Erros típicos¶
- misturou
CANLeCANL; - esqueci que o transceptor CAN é necessário;
- coloque um terminador em vez de dois;
- terminadores habilitados em todas as placas;
- não verificou resistência entre
CANLeCANL; - escolheu taxas de bits diferentes nos nós;
- espere
/dev/serial/by-idda ponte USB para CAN; - placa flashada para USB, mas conecte como CAN;
- piscou para CAN, mas não configurou
can0; - fez uma estrela com longos galhos em vez de um ônibus;
- acho que CAN é uma forma de alimentar a carga.
Key takeaway¶
CAN é uma boa interface para MCUs remotos, placas de cabeçote de ferramentas e sistemas distribuídos dentro de uma impressora. Ele usa um par diferencial CANL/CANL, requer transceptores CAN, topologia correta e dois terminadores nas extremidades do barramento.
Para o Klipper, o CAN é útil, mas mais complexo que o USB: você precisa atualizar a placa para CAN, configurar o adaptador/can0, encontrar o canbus_uuid e verificar o barramento físico. Use CAN onde ele realmente simplifica a hidratação ou melhora a robustez da conexão.
Related materials¶
- Klipper: CANBUS - official Klipper CAN documentation: hardware, host adapter,
can0,canbus_uuid, terminators, and USB-to-CAN bridge. - Klipper: CANBUS protocol - how Klipper assigns CAN node id and uses
canbus_uuid. - CAN Bus Debugger: CAN Bus Termination Explained - practical explanation of two
120 Ohmterminators,60 Ohmmeasurement, and common mistakes. - DigiKey: CAN Bus explained - general overview of CAN bus, differential communication, and application in distributed systems.
- Texas Instruments: Introduction to CAN - basic description of CAN physical layer, transceivers, and typical network.